[모쇼토이즈] 탁월급 시공용자 자이간트 & EX자이간트 프로토타입 리뷰
본문
Moshowtoys의 시공용자 자이간트 개발 중 프로토타입 리뷰를 진행합니다.
리뷰에 앞서, 보시게 될 시제품은 개발 중인 단계로 최종 상품과 차이가 있습니다.
대부분 의도대로 제작되지만, 제작 사정에 따라 몇몇 부분 수정과 조율이 되어 구조가 변경될 수 있고, 새로운 방식이 추가될 수도 있습니다. 이 점을 꼭 유의해 주시고, 봐주시길 바랍니다.

기본 코어 로봇부터 시작합니다. 크기는 대략 21cm로 기존의 탁월 클래스보다는 소폭 큰 사이즈입니다.
기본 소체는 되도록 극한의 가동률을 가지도록 제작 방향을 잡고, 여러 연동 기믹 효과를 제작했습니다.
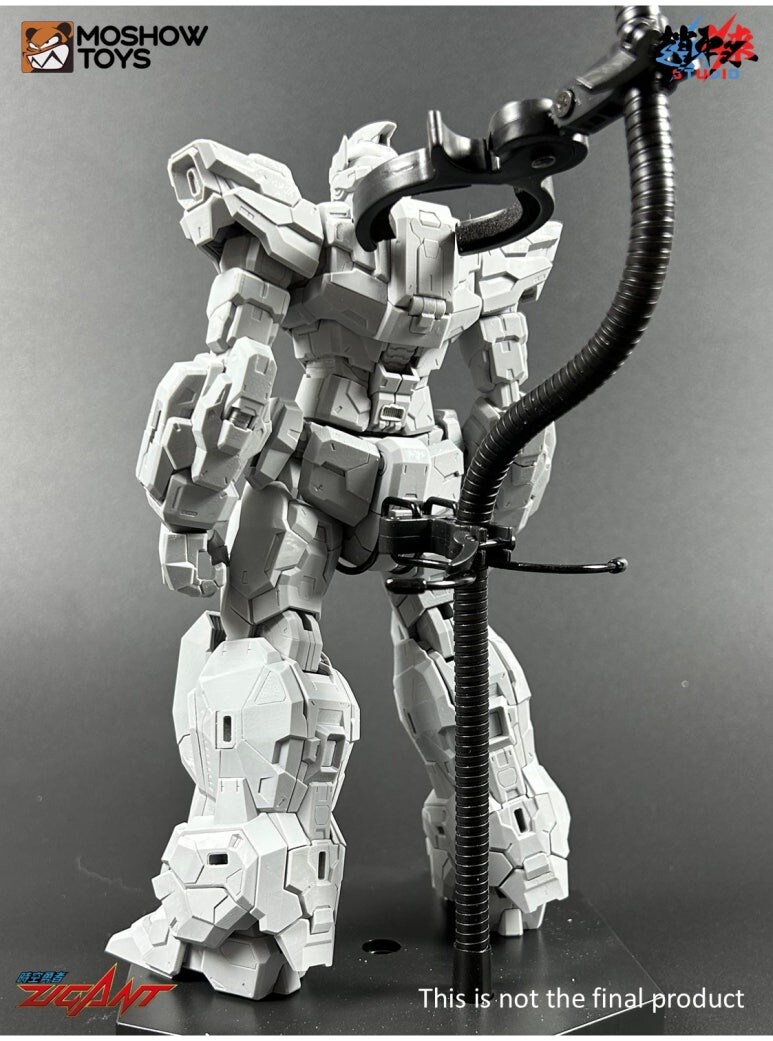
뒷모습도 세밀한 조형과 디테일로 코어 로봇만으로 괜찮은 제품이 되었으면 하는 마음으로 제작했습니다.

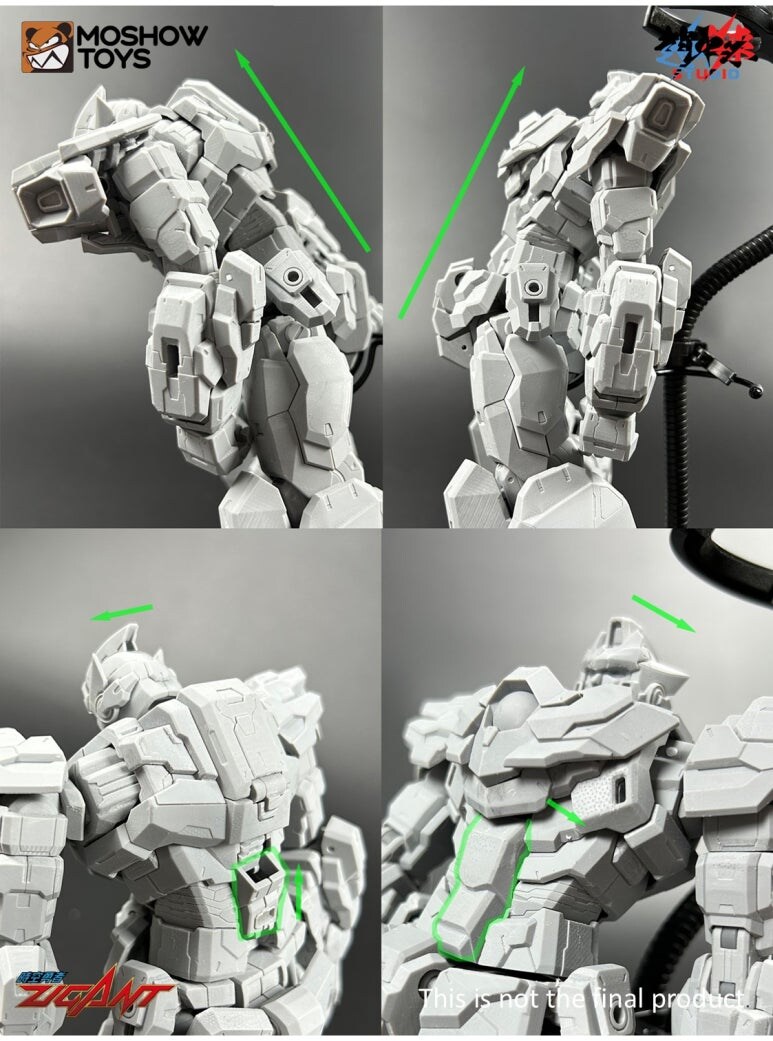
팔 부분의 가동 설명입니다.
어깨 장갑은 한 개의 축, 팔 관절은 상하 스윙 2개축 나머지는 기본적인 회전 축 관절을 가지고 있습니다.
어깨 장갑의 하단 부분이 위로 펼쳐지기 때문에 팔을 뻗는 동작 등을 조금 더 자연스럽게 만들 수 있습니다.
팔과 같은 축으로 회전 또한 가능합니다.

팔 관절을 다 접었을 때 상단의 이미지와 같이 접어지며, 팔꿈치 부분에 계단식 전개 기믹이 있습니다.
프레임이 조금 전개되며, 전체 라인을 자연스럽게 만들 수 있게 되어있습니다.
팔 하단에 팔목 부분의 회전축(A)을 몸 방향으로 접으면, 실린더(B)가 연동 되는 기믹이 있습니다.
미세한 포즈 조정에 도움이 되며, 기계적인 움직임의 재미를 볼 수 있습니다.

허리의 좌우 스윙과, 어깨를 앞으로 뻗는 회전축입니다.
기본적인 수준의 범위로 제작되었습니다.
허리의 앞뒤 회전 가동입니다.
연동기믹이 앞뒤 모두 제작되어 있습니다.
기본적으로 프레임이 전개되고,
몸을 앞으로 숙이게 되면 뒤쪽 척추의 디테일이 상하 방향으로 올라가며, 연동기믹이 작동합니다.
반대로 뒤로 접게 되면 허리 중앙 쪽 조형이 연동하여 앞뒤로 움직입니다.
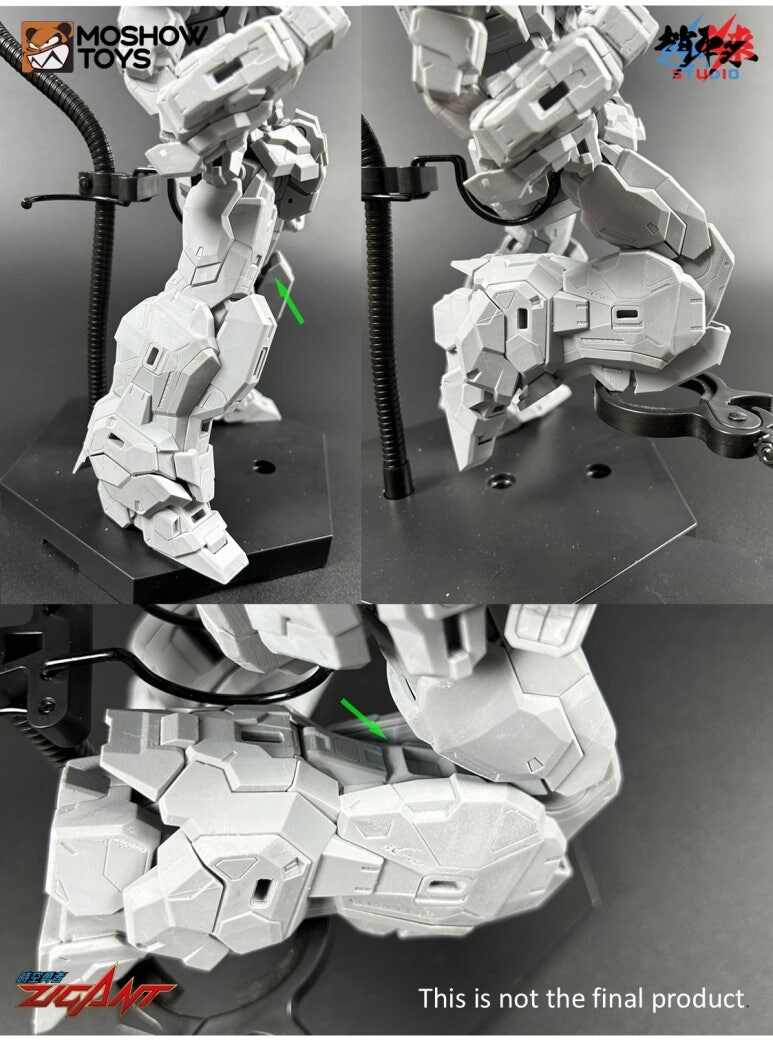
다리 관절입니다. 기본적으로 다리를 접을 때, 앞쪽 무릎의 아머와 뒤쪽 종아리 부품이 연동되어 움직입니다.
최대로 접었을 때 마치 많이 접히지 않는 것처럼 보이지만, 회전축의 포인트와 연동 기믹 효과로 많은 포즈를 취하는데 전혀 문제가 없을 정도로 우수한 가동을 보여줍니다.
특히 이 부분은 합체 파츠를 결합하더라도 같은 가동 범위를 가지게 됩니다.

발목 부분의 다리 아머는 좌우로 전개되기 때문에 발목의 각도 조절을 자유롭게 조절할 수 있습니다.

이러한 각부의 가동으로 슈퍼히어로 랜딩 포즈와 같은 것도 손쉽게, 라인이 무너지지 않게 포즈를 취할 수 있습니다.
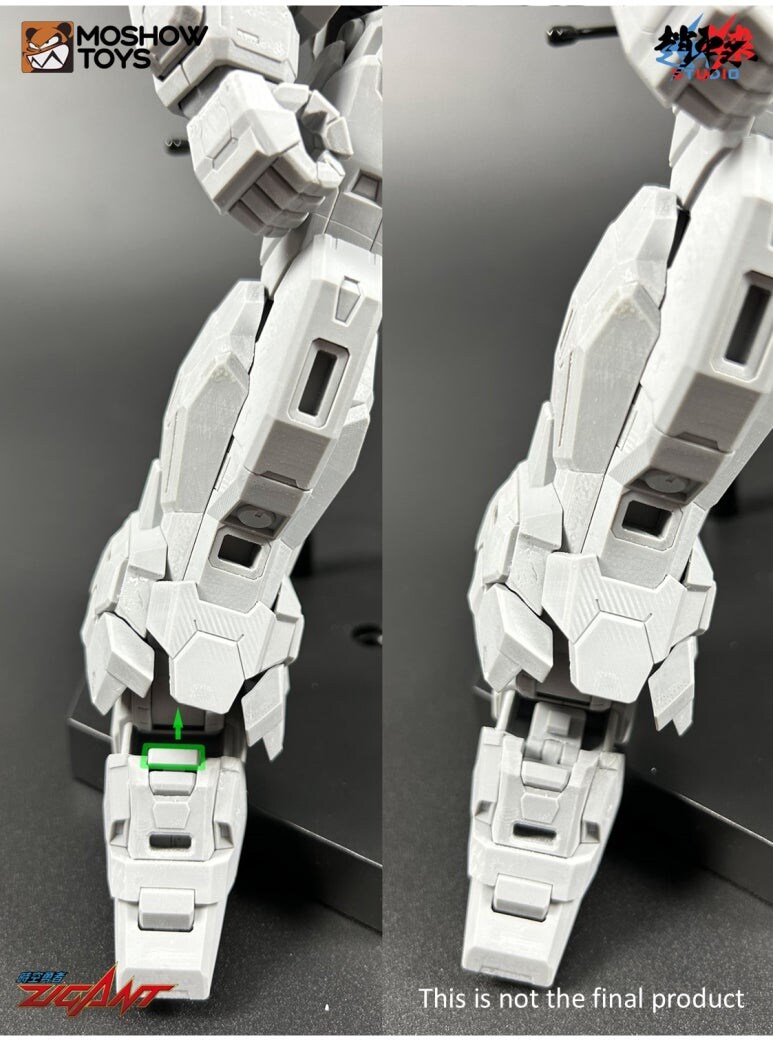
발목 관절 앞 부분에 전개되는 부품이 있습니다.
발목 관절의 위로 올리고, 해당 부품을 전개하여 고정하게 되면, 합체 포지션이 됩니다.
그리고 다리 길이가 길어져서 코어 로봇의 이미지가 조금 달라집니다.

다리가 조금 길어져서 키가 커 보이는 효과가 있습니다.